repman a écrit : ↑mar. mars 31, 2020 7:16 am
Merci pour ton travail Myoda.

Merci pour ton message ! J'espère que ça peut aider.
Fullnegi a écrit :
Je n'y connais rien en programmation ni en électronique, et j'ai pu intégrer une DED dans mon pit, c'est juste fou !
Super content que cela fonctionne ! Ca fait toujours plaisir de voir un nouveau Cockpit avancer !
Fullnegi a écrit :
Avec la 4.9, aucun scintillement. C'est super agréable. Malgré tout; j'ai essayé de jouer avec le refresh rate et les bauds et j'ai quand même un soucis.
Soit l'écran est lent à changer d'affichage, soit il ne me "suis pas". Si je vais trop vite à rentrer des valeurs, il reste "bloqué" à l'affichage d'avant et attends le prochain refresh.
Quels sont les valeurs qui fonctionnent bien chez toi? Je suis arrivé à un compris pas trop dégueu vers les 100m/s.
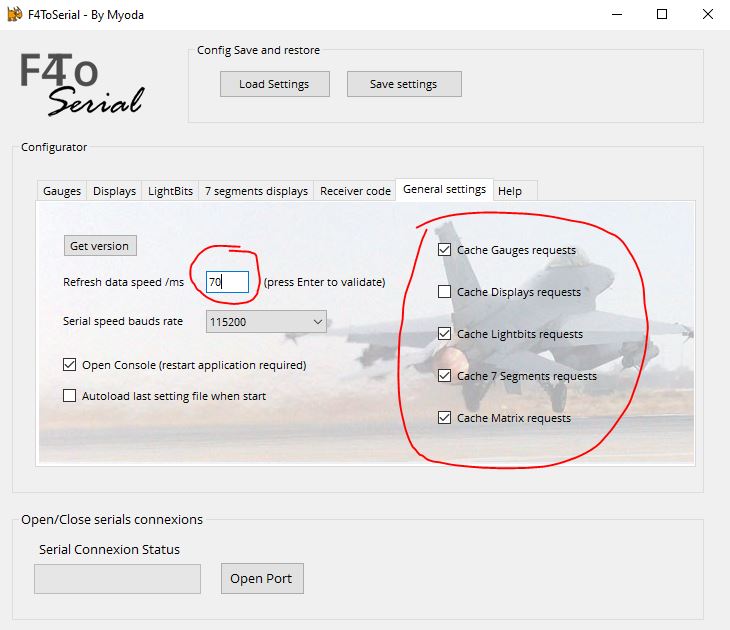
Il y a deux paramètres à prendre en compte.
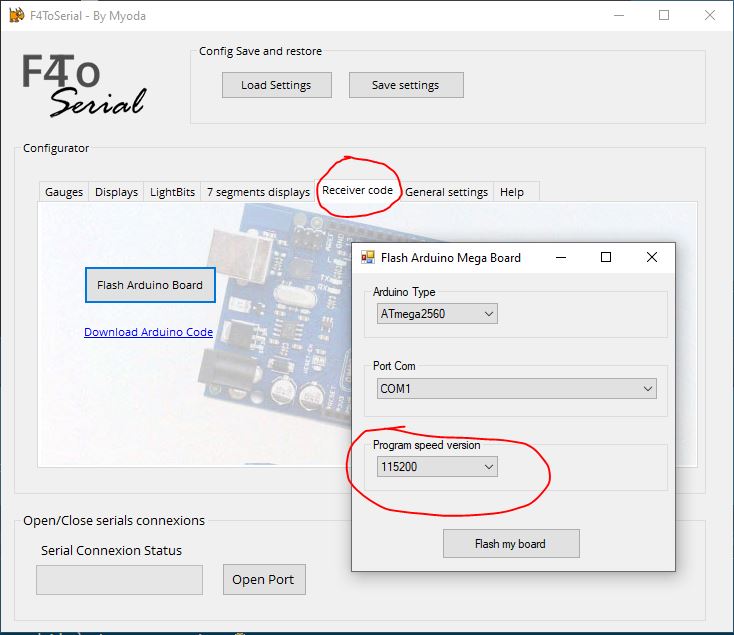
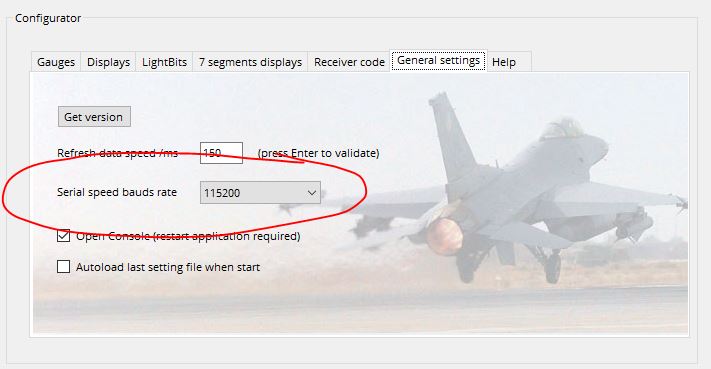
- La vitesse de transfert des données sur le port série (SP) exprimé en bauds, c-a-d depuis ton pc vers ta carte arduino.
- La vitesse de rafraîchissement des données (VRD) exprimé en ms, c-a-d le nombre de fois par seconde ou tu envoies les infos sur la (les) cartes arduinos.
En gros plus SP est élevé, mieux c'est. Sur F4ToSerial, tu peux aller jusqu'a 1 Millions de bauds. Mais certaines carte ne l'acceptent pas. Tout dépends du matériel. Mais il semblerai que les processeurs ATMega le supportent très bien selon mes tests. En gros, plus cette vitesse SP est élevée, plus les données sont envoyées vites et plus la carte Arduino vide de ce qu'on appelle le "buffer". C'est un tampon qui retient les données sur ta carte arduino.
D'un autre côté, la vitesse de rafraîchissement VRD est importante. Car si le nombre est trop petit (par exemple 50 ms) ça veut dire que tu satures la carte avec des informations envoyées toutes les 50 ms. C-a-d 1 trame de données toutes les 0,05 sec !!
En même temps, si la valeur de VRD est trop longue (1000) tu envoies une infos toutes les secondes. Hors dans le cas de l'affiche des secondes sur le DED (écran par défaut) l'heure étant affiché, il faut donc avoir une valeur inférieure à une seconde.
Un autre problème se pose. Je l'ai expliqué avant, mais il faut bien comprendre qu'un écran DED, affiche les infos par "balayage". c-a-d, il faut attendre que celui-ci ai terminé d'afficher le résultat "pixel par pixel" pour afficher les données suivantes. Sa vitesse (boucle) est donc limitée.
Donc, si tu changes avec ton ICP très vite plusieurs fois l'affichage de l'écran DED, et que la valeur de VRD est trop grande, le temps que l'affichage des infos apparaissent sur l'écran, la boucle n'est pas finie et ta carte n'a pas pu eu le temps de traiter la demande suivante envoyée sur le port série.
En résumé :
- Déjà je t'invite a mettre les écrans oled (DED, FFI et PFL) à part, sur une seule carte. Et non avec par exemple une matrice de led etc....
- Ensuite, selon mes test, je n'ai aucun problème avec une vitesse de transfert SP de 125.000 et un VRD de 100 ms comme toi.
Cela fonctionne nickel dans mon cockpit. je n'ai pas de problème particulier.
J'ai été un peu long, mais j'espère que cela te permettra d'y voir plus clair et de trouver les bon paramètres de ton côté, car il faut maîtriser ses deux paramètres ce que tu semble avoir déjà compris.
N'hésite pas si besoin !
A bientôt.