

Oui, mais 25€ de frais de portDiabolo_101 a écrit :A noter que j'ai utilisé les petits carrés d'affichage de chez Hispapanels, pas trop envie de passer du temps la dessus vu le prix du set complet pour le cockpit, à la bonne taille Jay-El en plus (F-16 Labels)
Diabolo F16 pit
Re: Diabolo F16 pit
#26(\_/)
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
-
 Diabolo_101
Diabolo_101
Topic author - Nouvelle Recrue

- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#27Sauf si on a un ami qui vit en Espagne et qui rentrait pour les fêtes de fin d'annéeMilos a écrit :Oui, mais 25€ de frais de portDiabolo_101 a écrit :A noter que j'ai utilisé les petits carrés d'affichage de chez Hispapanels, pas trop envie de passer du temps la dessus vu le prix du set complet pour le cockpit, à la bonne taille Jay-El en plus (F-16 Labels)
Voilà, j'ai terminé le Master Caution
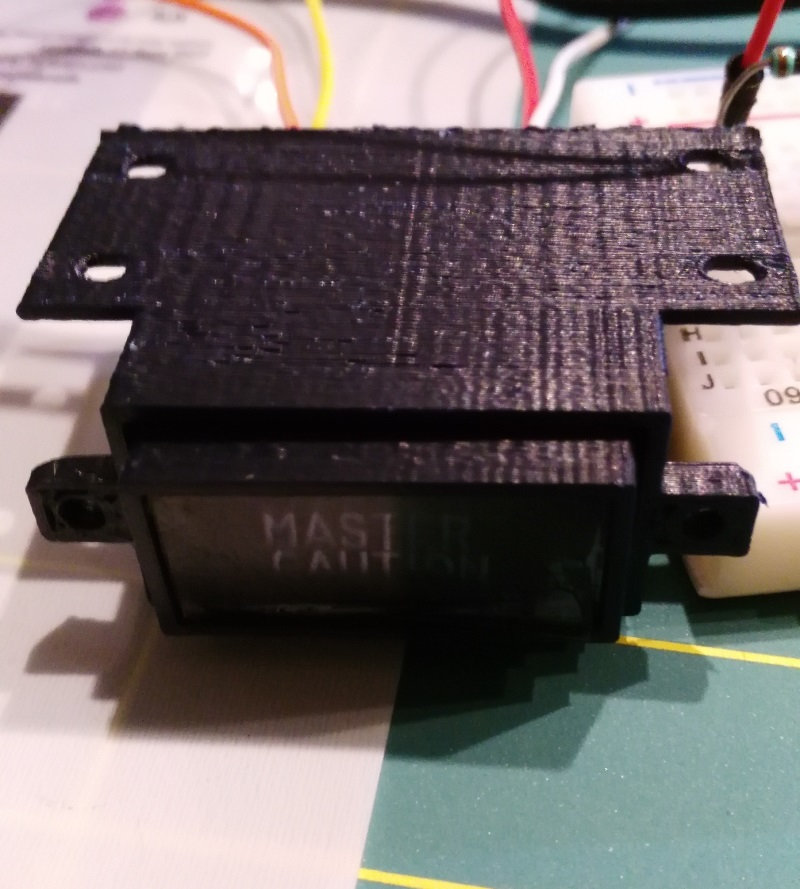
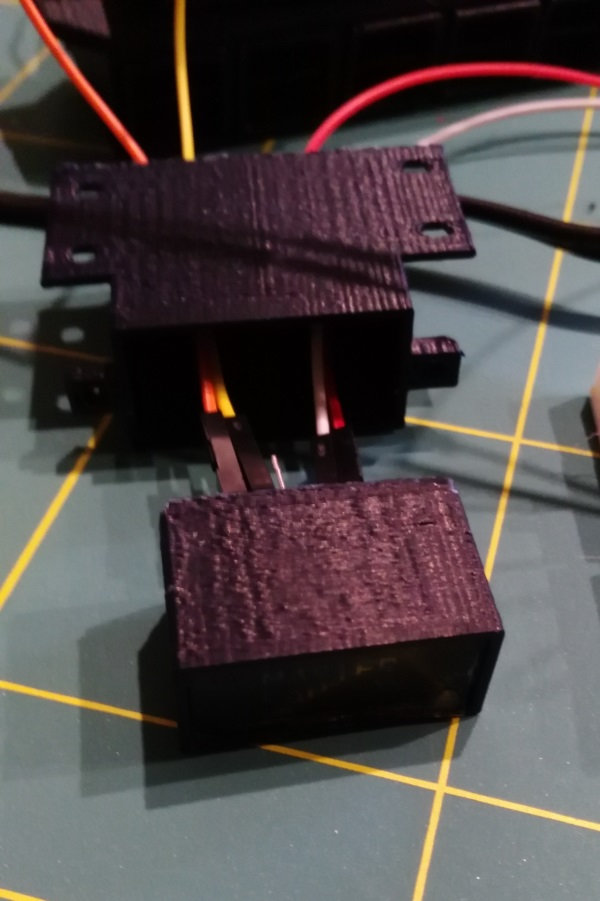
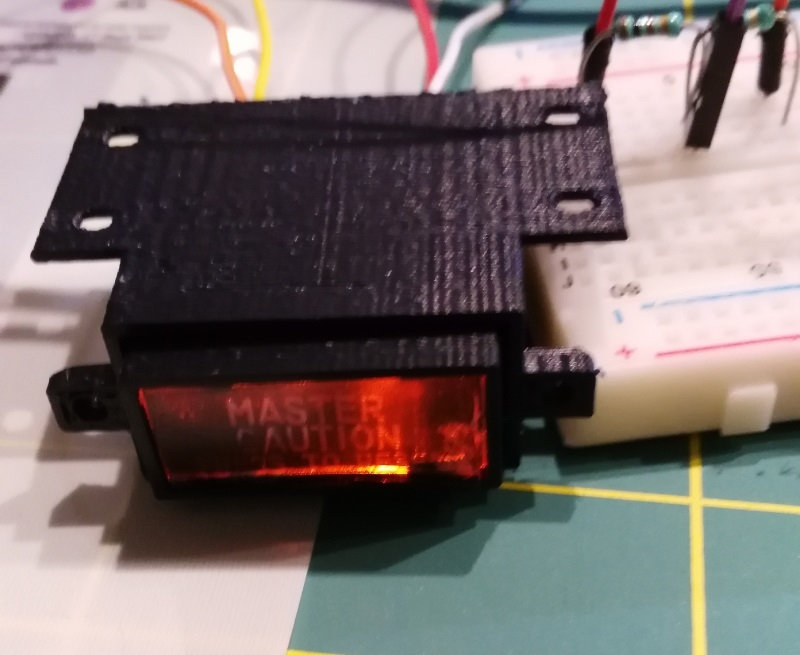
(j'ai fait le carreau vite fait, juste pour le test, ce n'est pas le final)
J'ai fait le design pour fonctionner avec ces inters:
Inters
et cette visserie:
Visserie
J'ai posté les fichiers STL dans le post dédié
Re: Diabolo F16 pit
#28Donc j'ai un an pour me faire un ami espagnolDiabolo_101 a écrit :Sauf si on a un ami qui vit en Espagne et qui rentrait pour les fêtes de fin d'année
(\_/)
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
-
Diabolo_101
Topic author - Nouvelle Recrue
- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#29Salut à tous, ça fait un bail que je n'avais pas posté, mais les derniers mois ont été quelques peu mouvementés...
Dans les news, je me suis inscrit à un Fablab (laboratoire de fabrication communautaire) qui m'a permis d'apprendre à utiliser une machine CNC industrielles et une découpeuse laser. Cela m'a permis de fabriquer l'encadrement du cockpit avec précision. Je n'avais pas prévu au départ de refaire une structure, mais bon, aucune volonté ... J'ai utilisé la découpeuse laser pour faire mes panels, avec 2 épaisseurs transparentes et une translucide blanche pour le rétroéclairage.
... J'ai utilisé la découpeuse laser pour faire mes panels, avec 2 épaisseurs transparentes et une translucide blanche pour le rétroéclairage.
J'ai reçu pas mal de pièces également: Les boutons et inters, un caution panel fonctionnant sur base Arduino micro, la vitre du HUD, un encadrement HSI, des PoKeys et des Arduinos. J'ai également reçu tous les écrans qui iront derrière les MFDs et instruments. J'ai à peu près tous les composants nécessaires à présent, me manque plus que du temps pour monter tout ça...si quelqu'un en a de trop, je prends...
Concernant les réalisations en impression 3D, j'ai fait une boite pour le DED car l'écran Oled que j'ai acheté est celui avec les pins sur le coté, ce qui fait qu'il n'est pas possible de le mettre dans les boitiers recommandés traditionnellement...Le boitier permet d'y fixer la carte Arduino Uno, Due ou mega pour le projet DEDuino. J'ai aussi imprimé la poignée d'éjection en filament flex, le résultat est plutot pas mal.
Prochianes étapes:
- achever la structure
- continuer la construction de la console centrale, interfacer les MFD et ICP, faire fonctionner les gauges (je ne sait pas encore si je vais utiliser la solution de Myoda (Arduino/X27) ou celle basée sur la POKeys/Polulu/Servos moteurs.
- achever la construction des panels
@+
Diab
Dans les news, je me suis inscrit à un Fablab (laboratoire de fabrication communautaire) qui m'a permis d'apprendre à utiliser une machine CNC industrielles et une découpeuse laser. Cela m'a permis de fabriquer l'encadrement du cockpit avec précision. Je n'avais pas prévu au départ de refaire une structure, mais bon, aucune volonté
J'ai reçu pas mal de pièces également: Les boutons et inters, un caution panel fonctionnant sur base Arduino micro, la vitre du HUD, un encadrement HSI, des PoKeys et des Arduinos. J'ai également reçu tous les écrans qui iront derrière les MFDs et instruments. J'ai à peu près tous les composants nécessaires à présent, me manque plus que du temps pour monter tout ça...si quelqu'un en a de trop, je prends...
Concernant les réalisations en impression 3D, j'ai fait une boite pour le DED car l'écran Oled que j'ai acheté est celui avec les pins sur le coté, ce qui fait qu'il n'est pas possible de le mettre dans les boitiers recommandés traditionnellement...Le boitier permet d'y fixer la carte Arduino Uno, Due ou mega pour le projet DEDuino. J'ai aussi imprimé la poignée d'éjection en filament flex, le résultat est plutot pas mal.
Prochianes étapes:
- achever la structure
- continuer la construction de la console centrale, interfacer les MFD et ICP, faire fonctionner les gauges (je ne sait pas encore si je vais utiliser la solution de Myoda (Arduino/X27) ou celle basée sur la POKeys/Polulu/Servos moteurs.
- achever la construction des panels
@+
Diab
- Pièces jointes
-
- IMG_20171001_185325.jpg (81.1 Kio) Consulté 4051 fois
-
- IMG_20170831_200204.jpg (74.69 Kio) Consulté 4051 fois
-
- IMG_20170407_174933.jpg (114.04 Kio) Consulté 4051 fois
-
- 100_1993.JPG (74.8 Kio) Consulté 4051 fois
-
- 100_1989.JPG (167.48 Kio) Consulté 4051 fois
-
-
 MIKE-SIMULATION
MIKE-SIMULATION
- Pilote Confirmé

- Messages : 2335
- Inscription : 05 décembre 2003


Re: Diabolo F16 pit
#32Ça fait plaisir de voir toutes ses petites pieces prêtes à êtres assemblé 
Allez, j'attend avec impatience leurs assemblages.
Bon courage à toi.
Repman
Allez, j'attend avec impatience leurs assemblages.
Bon courage à toi.
Repman
TrackIR V4 + TrackClip Pro / HOTAS Cougar - FFSB R1 - Throttle effet Hall/ Beyerdynamic MMX300 / MSI Z97 gaming 5/ Nvidia Gigabyte GTX 1080Ti / Intel core i5-4690K / Windows 10 / RAM DDR3 32GB / SSD Samsung 840 Pro 256 Go
-
 Ex Machina
Ex Machina
- Pilote Philanthrope

- Messages : 1925
- Inscription : 22 mai 2003
Re: Diabolo F16 pit
#33La vache, encore un furieux !!! Joli travail !!!
Tes écrans pour les MFD tu les as pris où stp ?
++
Tes écrans pour les MFD tu les as pris où stp ?
++
Stephane
Star Citizen Referal Code : STAR-M5HV-KNVC
DCS : FFW10 "RoOster"
i7-4790k @4,6Ghz / Assus Z97-A / 32Go DDR3 1866 / SSD 850 Pro 128&512Go / GTX1080 Ti 11Go / Trackir 5 / Thrustmaster Cougar-Warthog-MFD / Palo VKB / Acer 27" G-Sync 2560*1440 @ 144Hz
Star Citizen Referal Code : STAR-M5HV-KNVC
DCS : FFW10 "RoOster"
i7-4790k @4,6Ghz / Assus Z97-A / 32Go DDR3 1866 / SSD 850 Pro 128&512Go / GTX1080 Ti 11Go / Trackir 5 / Thrustmaster Cougar-Warthog-MFD / Palo VKB / Acer 27" G-Sync 2560*1440 @ 144Hz
-
Diabolo_101
Topic author - Nouvelle Recrue
- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#34Bonjour à tous et joyeuses Pâques!!
Cela fait plusieurs mois sans mises à jour...beaucoup de boulot, et de temps en temps un petit passage sur le pit...
Le travail s'est principalement focalisé sur la console centrale: le hud box et les cadrans, toujours avec un max de pièces imprimées en 3D. Je suis pour le moment en train de terminer les indexeurs et le hud glass.
J'ai également travaillé sur le bras de la manette des gaz, en utilisant une plaque de 5mm de PVC noir, découpée et thermoformée au décapeur thermique, avec un peu d'epoxy pour la finition. Plutot content du résultat.
Quelques tests de design d'impressions 3D, avec les switch cover et les roues d'ICP pour y intégrer directement les potentiomètres B103
voilou voilou
PS: Pour la question sur les écrans, ils viennent pour la plupart d'eBay.
Cela fait plusieurs mois sans mises à jour...beaucoup de boulot, et de temps en temps un petit passage sur le pit...
Le travail s'est principalement focalisé sur la console centrale: le hud box et les cadrans, toujours avec un max de pièces imprimées en 3D. Je suis pour le moment en train de terminer les indexeurs et le hud glass.
J'ai également travaillé sur le bras de la manette des gaz, en utilisant une plaque de 5mm de PVC noir, découpée et thermoformée au décapeur thermique, avec un peu d'epoxy pour la finition. Plutot content du résultat.
Quelques tests de design d'impressions 3D, avec les switch cover et les roues d'ICP pour y intégrer directement les potentiomètres B103
voilou voilou
PS: Pour la question sur les écrans, ils viennent pour la plupart d'eBay.
- Pièces jointes
-
- CenterConsole.jpg (162.02 Kio) Consulté 3611 fois
-
- CenterConsole1.jpg (114.55 Kio) Consulté 3611 fois
-
- Throttle1.jpg (59.22 Kio) Consulté 3611 fois
-
- 100_2015.JPG (131.48 Kio) Consulté 3611 fois
-
- ICP Wheel and Pot3.jpg (19.6 Kio) Consulté 3611 fois
-
- HUD Box 1.jpg (100.96 Kio) Consulté 3611 fois
Re: Diabolo F16 pit
#35Ah ben ça commence à avoir une bonne gueule, tout ça 
(\_/)
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
-
MIKE-SIMULATION
- Pilote Confirmé
- Messages : 2335
- Inscription : 05 décembre 2003
Re: Diabolo F16 pit
#36Salut
Superbe boulot, pour tes roues de l'icp tu va faire comment pour les fixer?
J'ai acheté cela pour mon icp
http://s.aliexpress.com/VvAz2iay?fromSns=Messages
Superbe boulot, pour tes roues de l'icp tu va faire comment pour les fixer?
J'ai acheté cela pour mon icp
http://s.aliexpress.com/VvAz2iay?fromSns=Messages

-
Diabolo_101
Topic author - Nouvelle Recrue
- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#37@Mike, j'ai également commandé ces potars sur la bay, ils sont légèrement plus encombrants (épais) que celui sur ma photo. Ayant un ICP qui a déjà pas mal d'années (et que je ne compte pas changer ;-)), j'ai très peu de place pour usiner. J'utiliserai donc les 2 pins disponibles pour le fixer, et un peu de colle pour solidifier (un peu car il faut que je puisse le changer en cas de problèmes...). Les pins du potentiomètre que j'ai choisi arrivent également plus loin que sur l'autre, ce qui dans le cas de mon ICP est nécessaire pour un cablâge correct à l'arrière. Je posterai des photos dès le montage terminé, ce sera plus explicite ;-)

Re: Diabolo F16 pit
#38La tête de visée est magnifique
Pilote indépendant de F16 block 50/52 sur Falcon BMS - HOTAS Cougar modé FCC1 - Saitek Pro Rudder Pedals - ED TRacker - 2x MFD Cougar - ICP "CatPlombe" - 1x Carte Pokeys - un cockpit F16 en chantier - CM MSI B650 Gaming ; AMD Ryzen 7800X3D 4,20GHz ; 32 Go DDR5 Corsair ; AMD Radeon RX7900XTX 24Go DDR6 ; Ecran Hisense 55" 4K



-
Diabolo_101
Topic author - Nouvelle Recrue
- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#40Salut,
Pas mal temps sans mises à jour. Je prends enfin le temps de poster un update…
Beaucoup de choses se sont passées, j'essaie de rendre le bidule volable...
Tout d'abord, le bac est terminée. Il est peint et a reçu les decals qui vont bien pour apporter la touche finale


Je dois encore travailler sur les flancs et installer les rails pour les panels.
La console centrale est presque finie, après des déboires avec Windows 10 et sa gestion multi écrans.


J'ai recréé le design des eyebrows en me basant sur le fonctionnement d'un véritable EI-Jay. Je suis assez content du résultat. Le TWP vient de chez hispapanels



J'utilise l'outil F4ToSerial de Myoda pour communiquer entre le cockpit et falcon4. J'utilise uniquement des POKeys pour l'émulation de clavier. Pour les panels, j'ai un mélange de faits maisons (découpe laser) et hispapanels. La raison en est la particularité: si un panneau requiert un EL-Jay ou un autre composant spécifique, j’utilise hispapanels, s’il s’agit d’une suite d'inters de base, je le fait moi-même





Pour les connexions, je me sers principalement de câbles (DB25 et DB15 (VGA - beaucoup de câbles en surplus depuis que l'HDMI est là !!!)). J'utilise des break out pour la connexion de câbles, cela rend les choses assez facile à tester, documenter et entretenir.

Pour les jauges, j’ai conçu une configuration utilisant à la fois des pièces découpées au laser et des pièces imprimées en 3D. J'utilise des moteurs X27 et fais en sorte que les jauges tiennent d'un seul tenant une fois assemblées. Il était alors plus facile de les installer. J'ai examiné plusieurs configurations similaires sur le Web, mais j'avais vraiment peu de place à l'arrière des jauges, j'ai du créer un nouveau design… Les jauges devaient également être facilement rétro-éclairées, comme les panels.





Dernier point mais non le moindre, j’ai conçu un nouveau système de rudder . Les pédales sont découpées dans un type de MDF (plus léger mais avec de bonnes propriétés de coupe) et recouvertes de fibre de verre. Le système est composé de profilés en aluminium de base et de ressorts à gaz basiques (avec la bonne force applicable). La fluidité du système est assurée par des roulements à billes sur chaque articulation. J'utilise un Arduino Leonardo pour simuler un «joystick» et deux capteurs à effet Hall pour les axes (gouvernail et freins).

Je travaille sur la configuration dela manette des gazs et du stick. Pour le stick, comme vous l’avez vu dans mon post précédent, j’utilise des FSR, avec un design personnalisé, imprimé en 3D également, avec de bons résultats aux tests.
À suivre…
Pas mal temps sans mises à jour. Je prends enfin le temps de poster un update…
Beaucoup de choses se sont passées, j'essaie de rendre le bidule volable...
Tout d'abord, le bac est terminée. Il est peint et a reçu les decals qui vont bien pour apporter la touche finale
Je dois encore travailler sur les flancs et installer les rails pour les panels.
La console centrale est presque finie, après des déboires avec Windows 10 et sa gestion multi écrans.
J'ai recréé le design des eyebrows en me basant sur le fonctionnement d'un véritable EI-Jay. Je suis assez content du résultat. Le TWP vient de chez hispapanels
J'utilise l'outil F4ToSerial de Myoda pour communiquer entre le cockpit et falcon4. J'utilise uniquement des POKeys pour l'émulation de clavier. Pour les panels, j'ai un mélange de faits maisons (découpe laser) et hispapanels. La raison en est la particularité: si un panneau requiert un EL-Jay ou un autre composant spécifique, j’utilise hispapanels, s’il s’agit d’une suite d'inters de base, je le fait moi-même
Pour les connexions, je me sers principalement de câbles (DB25 et DB15 (VGA - beaucoup de câbles en surplus depuis que l'HDMI est là !!!)). J'utilise des break out pour la connexion de câbles, cela rend les choses assez facile à tester, documenter et entretenir.
Pour les jauges, j’ai conçu une configuration utilisant à la fois des pièces découpées au laser et des pièces imprimées en 3D. J'utilise des moteurs X27 et fais en sorte que les jauges tiennent d'un seul tenant une fois assemblées. Il était alors plus facile de les installer. J'ai examiné plusieurs configurations similaires sur le Web, mais j'avais vraiment peu de place à l'arrière des jauges, j'ai du créer un nouveau design… Les jauges devaient également être facilement rétro-éclairées, comme les panels.
Dernier point mais non le moindre, j’ai conçu un nouveau système de rudder . Les pédales sont découpées dans un type de MDF (plus léger mais avec de bonnes propriétés de coupe) et recouvertes de fibre de verre. Le système est composé de profilés en aluminium de base et de ressorts à gaz basiques (avec la bonne force applicable). La fluidité du système est assurée par des roulements à billes sur chaque articulation. J'utilise un Arduino Leonardo pour simuler un «joystick» et deux capteurs à effet Hall pour les axes (gouvernail et freins).
Je travaille sur la configuration dela manette des gazs et du stick. Pour le stick, comme vous l’avez vu dans mon post précédent, j’utilise des FSR, avec un design personnalisé, imprimé en 3D également, avec de bons résultats aux tests.
À suivre…



Re: Diabolo F16 pit
#42Wahouuuu le truc de malade!!!!
Chapeau bas le rudder est SPLENDIDE!!!!
Chapeau bas le rudder est SPLENDIDE!!!!

Rafale Power!!!!!!!!!!!!!!
Re: Diabolo F16 pit
#43Il y a du lourd, là 
(\_/)
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
-
Diabolo_101
Topic author - Nouvelle Recrue
- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#44Salut salut, quelques petites mises à jour (confinement oblige, ça avance un peu...). J'ai principalement travaillé sur ma manette des gaz et stick (pour pouvoir voler finalement!) ainsi que le positionnement des rails pour les panels.



J'ai également finalisé ma Map Storage box

Et j'ai pu enfin monter le puzzle de la box du train d'atterrissage, j'avais créé les pièces il y a un moment, mais pas encore pu les mettre en musique, et imprimer les dernières pièces pour le mécanisme d’enclenchement des switchs. Le boitier avait été réalisé en pièces CNC, le cristal en découpe laser et les pièces de mécanisme en impression 3D. J'utilise un simple solénoïde pour le blocage. Petite vidé du fonctionnement en bonus


Prochaines étapes: un peu de connectique et du vol!!!
J'ai également finalisé ma Map Storage box
Et j'ai pu enfin monter le puzzle de la box du train d'atterrissage, j'avais créé les pièces il y a un moment, mais pas encore pu les mettre en musique, et imprimer les dernières pièces pour le mécanisme d’enclenchement des switchs. Le boitier avait été réalisé en pièces CNC, le cristal en découpe laser et les pièces de mécanisme en impression 3D. J'utilise un simple solénoïde pour le blocage. Petite vidé du fonctionnement en bonus
Prochaines étapes: un peu de connectique et du vol!!!

Re: Diabolo F16 pit
#45Très joli tout ça !
Et bien vu le solénoïde avec le déverrouillage manuel ! Je m’en inspirerai
Et bien vu le solénoïde avec le déverrouillage manuel ! Je m’en inspirerai

Core i5-4690K @ 3.5 GHz - 8Go RAM - Carte graphique GTX 970 - (Cougar + FSSB) - TPR - W10 64bits sur SSD - EdTracker - Un pit
Re: Diabolo F16 pit
#46J'ai vu ça au réveil, avant même mon café ... il m'a fallu du temps pour m'en remettre 
Maintenant que mon rythme cardiaque est redevenu à peu près normal, c'est quoi cette petite pièce sur le bord, sous le stick ?
Maintenant que mon rythme cardiaque est redevenu à peu près normal, c'est quoi cette petite pièce sur le bord, sous le stick ?
(\_/)
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
-
Diabolo_101
Topic author - Nouvelle Recrue
- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#47La pièce qui déborde est le FSSB (de RealSimulator) et son support. Le FSSB étant plus large que la base du stick, j'ai installé le support plus bas et ajouté une extension (qu'on peut trouver sur la bay) pour passer au travers de la base. Le support étant plus bas également pour être caché quand le siège sera mis en place. Cela ne dérange d'ailleurs pas car le dépassement est de l'ordre de 15mm. Quelques photos pour illustrer...







Re: Diabolo F16 pit
#49Une vue qui peut t'aidercat plombe a écrit : ↑mer. avr. 08, 2020 11:14 amEt bien vu le solénoïde avec le déverrouillage manuel ! Je m’en inspirerai

(\_/)
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
(_'.')
(")_(") "On obtient plus de choses avec un mot gentil et un pistolet qu'avec le mot gentil tout seul" Al Capone.
Mon pit
-
Diabolo_101
Topic author - Nouvelle Recrue
- Messages : 73
- Inscription : 02 mai 2003
Re: Diabolo F16 pit
#50Petite mise à jour: la console centrale est terminée à 95%, le hotas et le rudder sont fonctionnels, c'est un minimum pour pouvoir voler à nouveau, superbes sensations dans le pit!!!

Il me reste un problème que je ne peux pas comprendre: le commutateur rotatif à côté de HSI, qui permet la commutation TCN / ILS / NAV ne cesse d'envoyer des frappes clavier, quelle que soit la position. J'utilise une PoKeys pour mes switchs / Switchs rotatifs / encodeurs. D'autres switchs rotatifs installés fonctionnent bien, mais je ne sais pas pourquoi, celui-ci pose problème. Il est correctement câblé (j'ai vérifié deux fois), avec le Commun connecté à la masse et les autres pins aux bornes Pokeys, mais dès que j'attribue une valeur de touche clavier et charge les Pokeys, il commence à envoyer les frappes liées à toutes les valeurs possibles de TCN / ILS / NAV; bien que je laisse le commutateur immobile (et la même chose se passe si je passe à une autre valeur). J'ai ouvert un bloc-notes pour vérifier et je pouvais voir les différentes frappes écrites dans le fichier toutes les 2 à 5 secondes ... Vraiment étrange, quelqu'un a-t-il eu un tel comportement? Merci de votre aide
Il me reste un problème que je ne peux pas comprendre: le commutateur rotatif à côté de HSI, qui permet la commutation TCN / ILS / NAV ne cesse d'envoyer des frappes clavier, quelle que soit la position. J'utilise une PoKeys pour mes switchs / Switchs rotatifs / encodeurs. D'autres switchs rotatifs installés fonctionnent bien, mais je ne sais pas pourquoi, celui-ci pose problème. Il est correctement câblé (j'ai vérifié deux fois), avec le Commun connecté à la masse et les autres pins aux bornes Pokeys, mais dès que j'attribue une valeur de touche clavier et charge les Pokeys, il commence à envoyer les frappes liées à toutes les valeurs possibles de TCN / ILS / NAV; bien que je laisse le commutateur immobile (et la même chose se passe si je passe à une autre valeur). J'ai ouvert un bloc-notes pour vérifier et je pouvais voir les différentes frappes écrites dans le fichier toutes les 2 à 5 secondes ... Vraiment étrange, quelqu'un a-t-il eu un tel comportement? Merci de votre aide
